Transformer Inference Arithmetic
截至 2022-03-30
这篇文章介绍了 Transformer 模型中推理参数量、延时的计算,没有复杂的数学推导,与实验效果类似,有助于对 Transformer 有深入的理解。
前置知识:
- 对 Transformer 的基本理解 The Illustrated Transformer
- 参数计算的知识,LLM Parameter Counting
重新算一遍
head_size x num_head = d_model
attention
- Model Weight(Wqkvz): 4 x d_model x head_size x num_head = 4 x d_model^2
- KV: 2 x batch_size x seq_len x d_model x head_size x num_head 这部分不算base model的参数量
FFN
- Model Weight: 8 x d_model^2
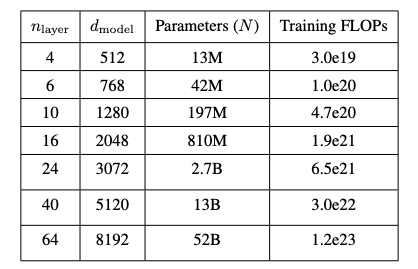
所以模型总参数量是 12 x d_model^2 x n_layers,即 12 x 8192^2 x 64 x 2 = 52e9
由于使用float16,所以模型总大小为 52e9 x 2 = 104e9 = 104GB
Flops
Attention
- KQVZ: 4 x 2 x d_model x head_size x num_head = 8 x d_model ^2
FFN
- 2 x 2 x 4 x d_model x d_model = 16 x d_model ^2
所以总的 flops 也是 24 x d_model^2 x n_layers
LLM Parameter Counting by kipply
模型训练过程中的权重的参数都是半精度浮点数,通常是 2 bytes 因为目前大部分训练都是在 half-precision(bfloat,但不是所有的半精度都是 bfloat) 下进行的。2020 年 的 GPT-3 Paper 使用了 half-precision。
解码器由 self-attention 层与 FFN 层组成,权重大小如下
- self-attention 自注意力层
Wq, Wk, Wv权重矩阵,其尺寸为(d_model, n_heads, d_head), 被用来把 input 映射成 QKV 向量Wo权重矩阵,其尺寸为(d_model, n_heads, d_head), 用于 self-attention 层的输出,接下来会传入 MLP 层(用于把拼接的 Z 映射为输出的 Z)- 所以这层的权重大小为
3*(d_model*n_heads*d_head)+d_model*n_heads*d_head=3*d_model*n_model+d_model*n_model=4*d_model^2 - 实践中(Attention Is All You Need),
d_model(也即 d_embedding 的尺寸)为 512,n_deads为 8,d_head为 64(在大多数 Transformer 架构中,d_head*n_head=d_model,d_head 也称为 Key/Value Size)
- MLP 多层感知机,也称为 Linear Layer 线性层,FFN Layer 前向反馈层
- 这部分有两个全连接层,第一层大小为
d_model*(4*d_model)=d_model^2*4, 第二层大小为(4*n*d_model)*d_model=d_model^2*4, - 所以这层的权重是两个
d_model^2*4矩阵,总大小为d_model^2*8⭐️ - 实践中,MLP 层的隐藏层大小是 d_model 的 4 倍,即
512*4=2048。每层都有一个偏置向量(此处不表),第一层偏置向量的大小为4*d_model,第二层偏置向量的大小为d_model,总计为5*d_model
- 这部分有两个全连接层,第一层大小为
- Layer Normalization 层(此处不表),大小为
d_model- 归一化权重(Layer Norm Weights):用于层归一化的缩放参数。
- 归一化偏置(Layer Norm Biases):用于层归一化的偏移参数。
在忽略偏置向量权重的情况下,可以计算模型的总权重如公式所示,
4*d_model^2+8*d_model^2=12*d_model^2- n_layers 为 64,是编码器堆叠层数
- d_model(input_embedding)大小为 128*n_layers=8192
- 计算得到 52B 模型的参数量
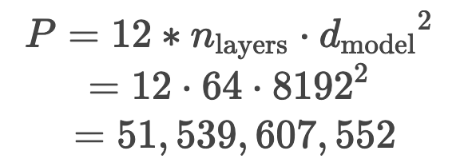
这里的52B指的是52Billion个参数,不是52B个byte,总大小应该是52Billion bytes
以上的计算还忽略了 Layer Normalization d_model 的参数,MLP 的偏置参数,以及位置编码的参数(在 GPT2 和原始 Transformer 中为 n_ctx+d_model,在Gopher 280B 模型中,有 21.5B 个参数用于相对位置编码),但在 Kipply 作者的表述中,这些参数量都可以忽略不计(zero)。
by ChatGPT
在一个深度学习模型中,特别是像GPT这样的变压器模型,每个“块”通常包含以下组件。每个块(或层)通常包括一个自注意力层和一个前馈神经网络层。以下是每个块中的主要权重和参数:
-
自注意力层(Self-Attention Layer)
-
查询权重(Query Weights):用于生成查询向量的权重矩阵。
-
键权重(Key Weights):用于生成键向量的权重矩阵。
-
值权重(Value Weights):用于生成值向量的权重矩阵。
-
输出权重(Output Weights):用于将注意力机制的输出映射回原始维度的权重矩阵。
-
-
前馈神经网络层(Feedforward Layer)
-
第一层权重(Feedforward Layer 1 Weights):用于第一个线性变换的权重矩阵。
-
第一层偏置(Feedforward Layer 1 Biases):用于第一个线性变换的偏置向量。
-
第二层权重(Feedforward Layer 2 Weights):用于第二个线性变换的权重矩阵。
-
第二层偏置(Feedforward Layer 2 Biases):用于第二个线性变换的偏置向量。
-
-
层归一化(Layer Normalization)
-
归一化权重(Layer Norm Weights):用于层归一化的缩放参数。
-
归一化偏置(Layer Norm Biases):用于层归一化的偏移参数。
-
这些权重和参数在训练过程中通过反向传播算法进行调整,以最小化损失函数,从而使模型能够有效地执行其任务。
Arithmetic
- KV Cache 解释了缓存 Self-attention 向量带来的性能提升,带来的权衡(tradeoffs)和成本。
- Capacity 介绍了 KV Cache 的存储成本,把它与模型权重存储联系起来,讨论 capacity 对性能的影响
- Model Parallelism 介绍了张量并行以及通信成本
- Latency Calculations 推理延时的计算 create equations that serve as floorlines for inference speed
- batch size 介绍 batch size 对性能的影响,以及最佳的 batch size
- flops counitng 讲解了在 transformer 模��型中每个块的 flops 计算速度,可以看出哪个块是计算密集型
- Intermediate memory costs 介绍了激活层需要额外的内存,以及在真实的基准(beachmarks)上内存带宽消耗是多少
- comparing against real benchmarks 和 Nvidia 的 FasterTransformer benchmarks report 作比较,明确差异在哪里
KV Cache
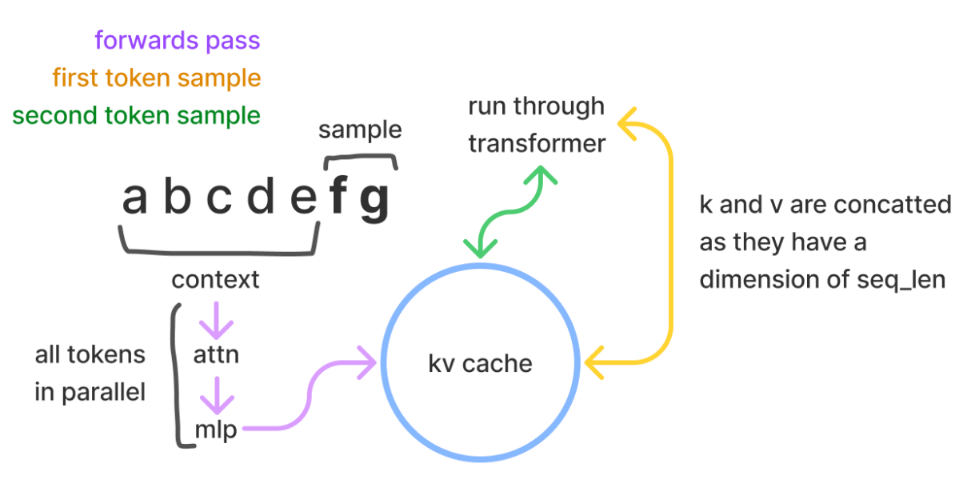
Transformer 推理主要包括两个步骤:首先并行处理提供的prompt,然后逐个生成新的 token(这就是自回归性质的体现)。
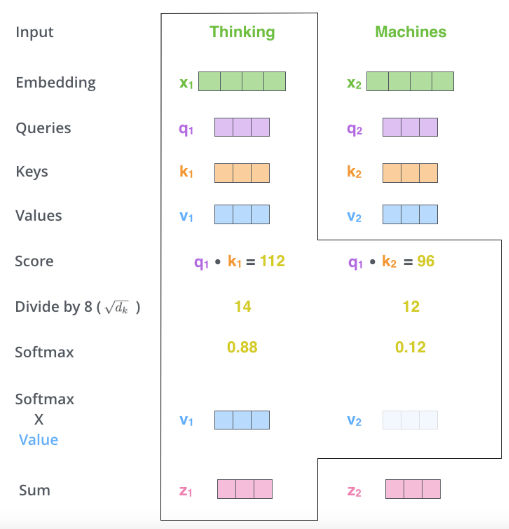
如下所示,在推理过程中,每个 token 都需要获取历史序列中每个 token 的键值对(kv)向量来计算自注意力(如下图所示,q1需要与k1v1,k2v2等计算得到z),无论这些 token 是来自初始的提示/上下文,还是生成的 token。这些键值对可以存储在一个被称为 kv 缓存(或称为过去缓存)的矩阵中。
KV Cache需要的维度为 [batch, 2, num_heads, seq_len, features]。(没有head_size嘛?)
- batch 是批次大小
2表示的是key(键)和value(值)两个矩阵,每个 token 都有一个key和一个value- num_heads 是多头注意力数量
- seq_len 是输入的序列长度
- features 是 token 的大小
一个token的KV存储
KV cache 的目的是避免对一个 token 的重复计算,因为参数是固定的,一个 token sampling 得到的 KV 向量也是固定的。我们可以把 KV 向量缓存起来,以空间换时间。其中,对于每个 token,我们需要的存储空间的大小如下(单位为 bytes)
![]()
- 第一个 2 代表 K,V 两个向量
- 第二个 2 是存储单位的大小,此文中我们使用 float16,有 2 个 bytes
- 接下来是 n_layers x n_heads x d_head,分别是解码器堆叠数 n_layer,n_heads 注意力头数,d_head 每个头的输出大小
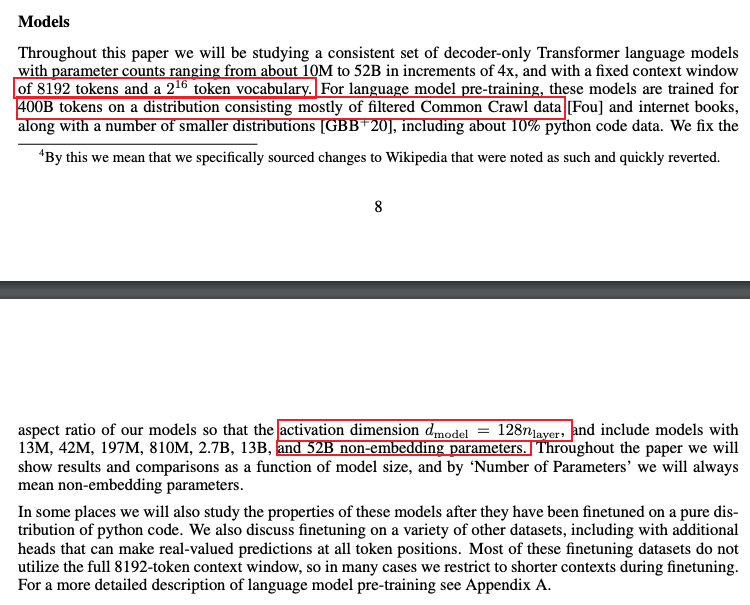
一个token的KV计算flops
一个 token 的 KV 向量的计算 flops(每秒浮点运算操作)如下所示
![]()
- 第一个 2 代表 K,V 两个向量
- 第二个 2 与 d_model^2 是矩阵乘带来的
- n_layers 是解码器的堆叠数
在一个矩阵乘(matmuls,matrix multiplication)中有多少浮点计算次数 flops(Floating-point operations per second)?
在 w(m, n) 与 x(n, 1) 的矩阵乘 wx(m, 1) 中,有 2mn 次运算。其中第一个 2 是因为矩阵乘 matmuls 需要计算(1)乘法(2)加法,即乘法后的累加。
在 w(m, n) 与 x(n, p) 的矩阵乘 wx(m, p) 中,有 2mnp 次运算
通过上述 Flops 计算公式可得,在 52B 参数的模型中(以 Anthropic's 为例 d_model 为 2^13=8192,n_layers 为 64),总 flops 如下
![]()
flops bound VS memory bound(一个token的计算和内存加载时间)
A100 每秒可以执行 312e12 次 flops 操作(312TFLOPS),内存带宽为每秒 1.5e12 bytes,比值为 312/1.5=208。
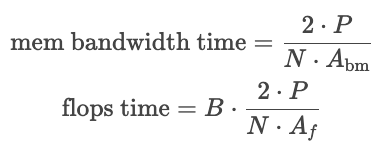
所以模型所需的存储和计算时间如下
- memory 的计算似乎写错了,作者写成 flops 的了? https://www.reddit.com/r/LocalLLaMA/comments/17q91ep/transformer_inference_arithmetic/

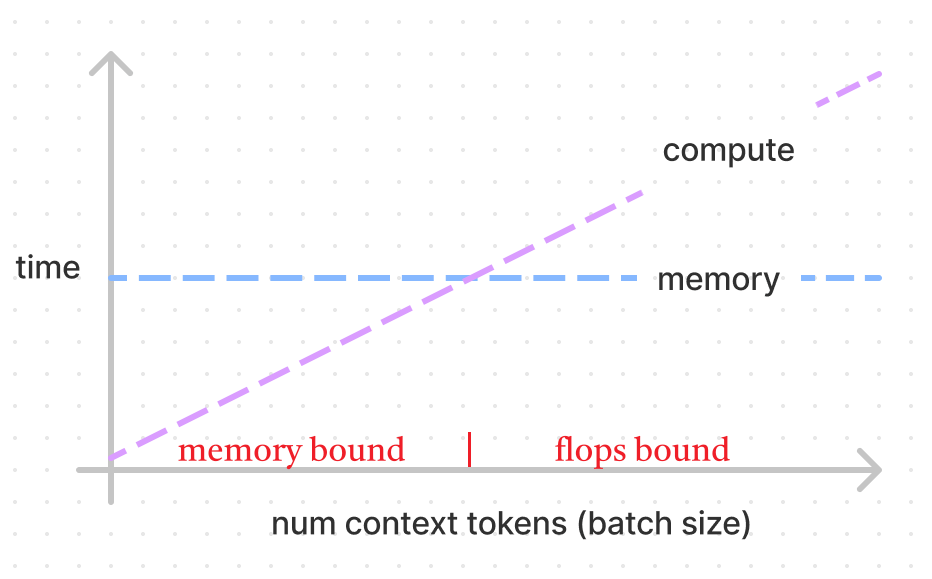
下图展示了计算与内存加载时间的关系,batch size 越大计算时间越多,而内存加载时间不变。对于 A100 而言,两线交点为 208 (ops:bytes),计算速度是内存加载速度的208倍。Nvidia 将计算时间与内存加载时间的对比称为“数学带宽”(math bandwidth),来形容这个受限关系。
- 如果少于 208 ,内存加载时间大于计算时间,为 memory bound(内存受限)。意味着处理器在等待内存传输完成,加载速度跟不上计算速度,内存带宽达到瓶颈。
- 如果超过 208,计算时间大于内存加载时间,为 flops bound(flops受限)。意味着计算能力达到瓶颈,内存带宽不是限制因素。
其他
-
对于 52B 的模型而言,前向计算 208 个 tokens 所需的权重加载时间为
2*12*n_layers*d_model^2/1.5e12~=69 millisecs,如果使用 4 个并行的 GPU,则约为 17 毫秒,如果有 416 个 tokens,会花两倍的时间,312 个 tokens 则需要 1.5 倍的时间。 -
计算一个 KV cache token 的时间(
2*2*n_layers*d_model^2)是一次前向计算的时间(2*4*n_layers*d_model^2)的1/6,一般来说prefill并行前向计算都非常快,而 sampling(decode) 则需要获得每个历史 token 的 KV 来计算自注意力。- 但实际上,每一步推理,都省了前面所有tokens的KV计算时间
n_tokens * 2*2*n_layers*d_modes,所以没有KV Cache的时候,decode阶段的时间复杂度将变成 O(n^2)
- 但实际上,每一步推理,都省了前面所有tokens的KV计算时间
-
有时,小 batch 会造成 memory bound 而不是 flops bound,这时我们更愿意去重新计算 KV 而非用过去的 cache。(我认为仅在小batch的情况下)
52B 模型参数维度
Anthropic's 提及的 52B 模型
- n_layers 为 64
- n_heads 为 128
- d_head 为 64
- d_model 为 128*n_layer = 8192
- n_voc 为 2^16
Nvidia A100 性能指标
-
flops 312e12
-
内存带宽 1.5e12 bytes
-
flops/内存带宽= 312/1.5= 208,对于其他GPU不一样
-
显存大小 40GB
-
通信带宽 300GB/s
KV 缓存 Capacity
在 GPU 中存储两个东西:KV Cache 和 Weights。
以 Nvidia A100 GPU 为例,其有 40GB 显存。
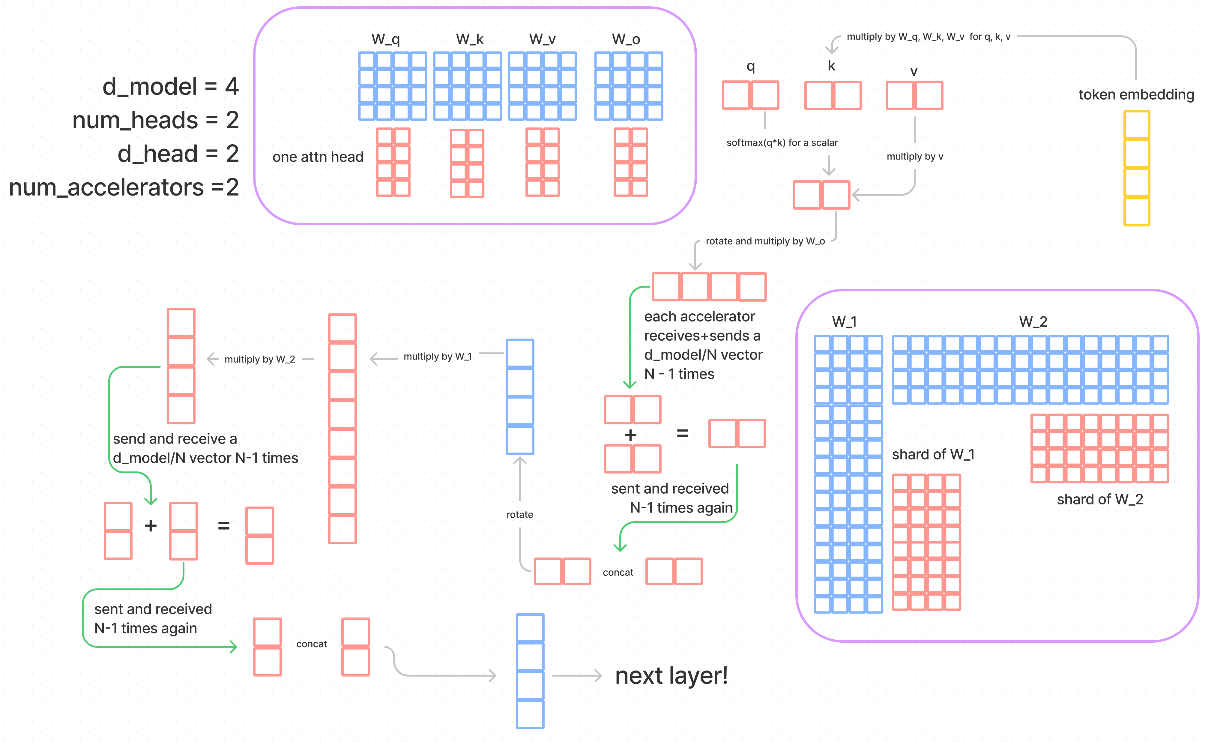
52B模型参数大小
52B 模型的参数存储空间如下所示,乘以2是因为 float16 有 2bytes
- 此处52B的参数量是 52e9
![]()
一个 A100 显存有限,考虑放在多个 GPU 中,三个 A100 共 120GB,去掉 104GB 模型参数,还剩 16GB 用来做 KV Cache。
16GB能装下 8000 个 tokens
- n_layers 为 64
- n_heads 为 128
- d_head 为 64
所以上面剩下的 16GB 只能装下 16/0.002≈8000 tokens,可以设置大小为 4 的 batch size,每个 batch request 可以处理最多 2048 个 tokens。
batch size 与 memory bound
我们希望 batch size 能够大一些(提高一次推理中的处理的请求量),这样子能够多利用内存带宽,提高计算量,处理更多请求。
如果 batch size 太小的话,我们会陷入 memory bound,即内存带宽没有跑满(因为加载1个token和加载208个token的时间是一样的),计算量并不饱和,可以考虑舍弃 KV Cache,直接进行计算。可以考虑新增一个 GPU,组成 4 个 GPU 增大显存总额,有更多空间做 KV Cache,从而能够增大 batch size。
- TODO:为什么这里不是 4 个 batch,2000 个 tokens?
- => GPT:选择 2048 而不是 2000,主要是因为 2048 是 2 的幂次方,而计算机系统(尤其是 GPU)在处理二进制数据时,对于这些特定的数�字往往更高效。不用非常严谨.
在中间的计算步骤中也有一些存储的需求,但他们可以忽略不计。
模型并行 Model Parallelism
下面描述一个模型并行的实现,以便对齐进行性能评估以及计算通信损失。
模型并行会带来一个问题,即内存加载权重的成本与计算量 flops 都会被拆分到每个GPU中。每个GPU都会使用其部分权重计算,并且在需要同步时通信。而在流水线并行中,每个 GPU 都会分配到一部分的权重。
- 在训练时,GPU可以一个接一个处理多个 batch 的数据,但在推理时,请求量小的情况下GPU会闲置下来。
- 在流水线并行中,常常会遇到 flops bound,内存带宽并不会用满。
- 唯一比模型并行好的是通信开销不同,流水线并行的通信开销为 d_model,而模型并行的通信开销是 N*d_model,此处的 N 是 GPU 的数量。
A100 的通信带宽是 300GB/s
- TODO: The doc marks it as 600GB/s because Nvidia is adding up 300GB/s into each chip and 300GB/s out simultaneously rather than using a bidirectional number (which will be more intuitive for our calculations). => bidirectional 是什么意思?
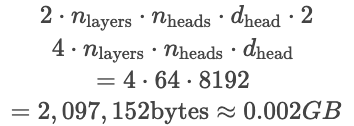
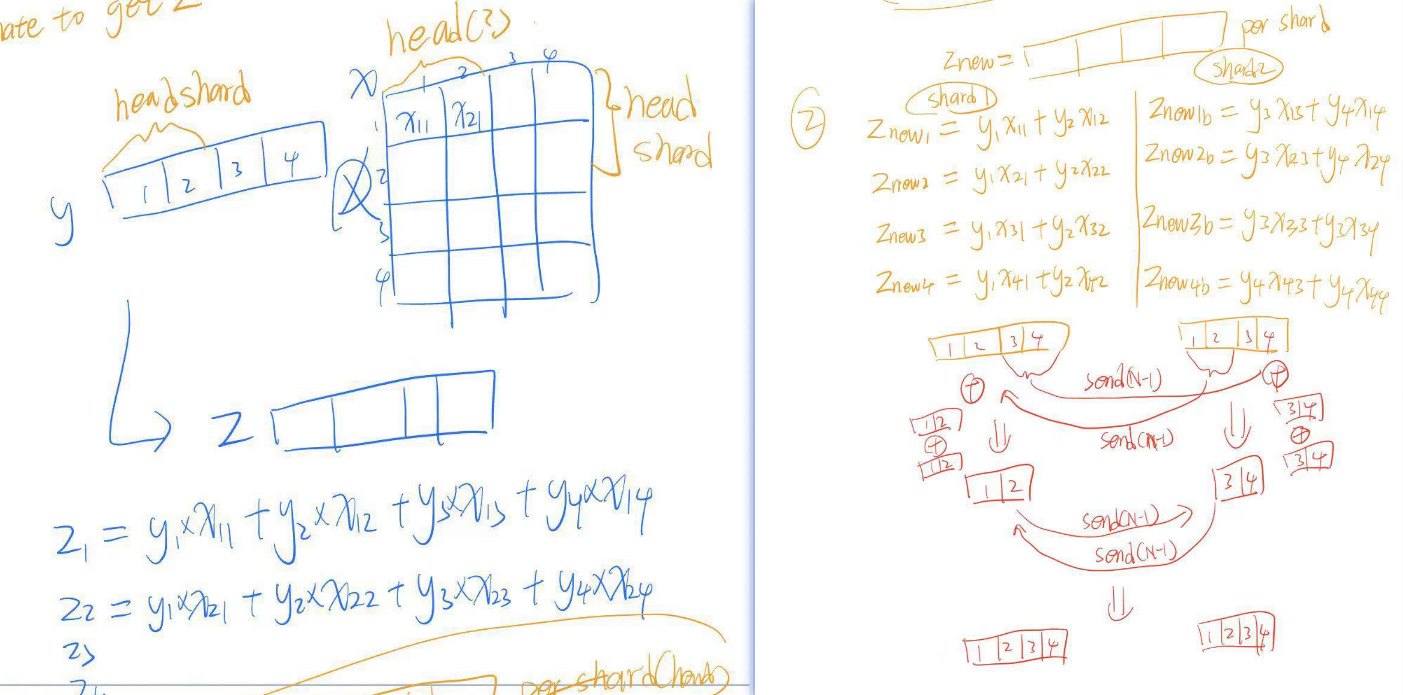
上图表述中,模型并行的核心是按注意力头 head 来把参数(WQ, WK, WV, WO, W1, W2)划分到各个 GPU 中。
- num_heads 为注意力头数量 2
- num_accelerators 代表着 GPU 数量,此处为 2,与 num_heads 一致。在上图场景也称作 N
- d_model 为 token embedding 大小 4
- d_head 为注意力头大小 2
计算 flow 详解
- 输入 X 大小(1,4)
- WQ, WK, WV 原来大小为 (4, 4),按 num_heads 划分 sharding (2, 4)到每个 gpu 中
- 由于 Transformer 架构中,计算 Z 本身就是每个注意力头各自计算,最后拼接得到 Z,所以此处 Softmax(XWQ*WK)WV 得到的 Z 与未并行情况下的 Z 是一致的
- 对于一个 GPU 来说,乘以 WO 最终得到输出 Z 后,这个 Z 虽然尺寸与未 sharding 一致为(1,4),但每个元素的值都不完整。
- 未并行情况下,Z(1,4) x WO(4,4)。并行情况下 Z(1,2) x WO(2,4),得到的输出都为(1,4)
- 假设 Z 矩阵称为 x,WO 称作 y。则原来的 Z11 = y1x11+y2x12+y3x13+y4x14。但在 GPU0 的 Z11 = y1x11 + y2x12,缺少的另外的y3x13+y4x14在GPU1中,所以我们需要把两个 GPU 的 Z11 相加才能得到和未并行情况一致的 Z。
- 综上所述,GPU0 有一个输出 Z(1,4),GPU1 有一个输出 Z(1,4),需要将他们矩阵加法才能得到正确的输出 Z
- 在这里的模型并行中,提到 GPU0 负责 Z[0, 1] 的加法,GPU1 负责 Z[2,3] 的加法,所以 GPU0 需要传输 Z[2,3] 给 GPU1,GPU1 需要传输 Z[0,1] 给 GPU0。这是上图提到的第一次 send and receive N-1 times
- 最终 GPU0 拥有正确的 Z[0, 1],GPU1 拥有正确的 Z[2,3],他们需要在做第二次传输,这是上图提到的第二次 send and receive N-1 times
- 最终 GPU0 将 Z[0,1] 与 Z[2,3] 拼接得到最终的输出 Z[0,3],GPU1 也同理(此处每个 GPU 都需要得到最终的输出 Z 是因为接�下来的 FFN 需要完整的 Z)
- 接下来的 FFN 层的 W1 W2 也是同理按 num_heads 划分都 GPU 中并行计算
- 分析与上面 WO 矩阵的并行分析一致
- 原来的自注意层输出的 Z(1,4),W1(4,16), W2(16, 4)
- 按 nun_heads 划分后,每个GPU的W1(4,8), W2(8, 4)
- 假设 FFN 层输出为 Y,那么 Y11=W2_1,1(W1_1,1xZ_1,1+W1_2,1xZ_1,2+W1_3,1xZ_1,3+W1_4,1xZ_1,4) +...+ W2_16,1(W1_1,16xZ_1,1+W1_2,16xZ_1,2+W1_3,16xZ_13,+W1_4,16xZ_1,4)
- 模型并行后,GPU0 获得的 Y 尺寸为(1,4),但 Y11 = W2_1,1(W1_1,1xZ_1,1+W1_2,1xZ_1,2+W1_3,1xZ_1,3+W1_4,1xZ_1,4) +...+ W2_8,1(W1_1,8xZ_1,1+W1_2,8xZ_1,2+W1_3,8xZ_13,+W1_4,8xZ_1,4)
- 可以看出 GPU0 中的 Y11 也是不完整的,需要与 GPU1 做 N-1 次发送接收通信,相加后,再做 N-1 次发送接收通信
- 此处忽略 layer norm 层的计算
- 最终每个 GPU 都得到了一层的完整输出 X
泛化公式
- 自注意层的 Wq, Wk, Wv 原始维度为
(d_model, d_head*num_heads),如果模型并行到 N 个 GPU 上,他们的维度变为(d_model, d_head*num_hdeas/N) - FFN 层的 W1 原始维度
(d_model, 4*d_model),并行到 N 个 GPU 上,维度变为(d_model, 4*d_model/N) - FFN 层的 WW 原始维度
(4*d_model, d_model),并行到 N 个 GPU 上,维度变为(4*d_model/N, d_model) - 其中,总共进行了
4(N-1)d_model/Nbytes 的通信- TODO: 这里的通信 bytes 应该还需要再乘�以 2?因为 d_model 是 float16,2bytes
延时的计算 Latency Calculations
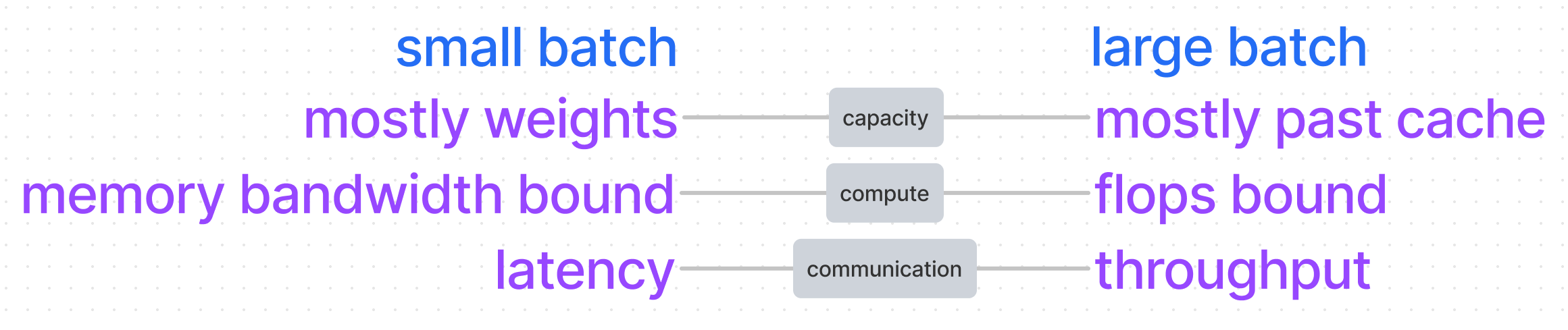
批量大小对延时的影响
如上图所示,要计算一个 token 的推理延时
- 小批量时,内存中基本都是模型参数,主要是 memory bound,flops 计算资源充裕,对于通信延时而言,通信带宽也没有打满,可以直接估计为尽可能小的通信延时。
- 大批量时,内存中基本是KV Cache,主要是 flops bound。对于通信延时而言,由于需求大,已经要考虑通信的吞吐量了。
延时计算主要与flops bound和memory bound 有关。而flops 计算量与batch size和参数量大小正相关,memory 加载仅与参数量大小相关。通信主要是引入两个新条件:latency,吞吐量 throughput。
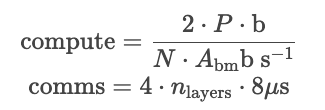
小批量延时计算公式
小批量(如1)的 latency 计算公式如下所示。
- Compute
- 解释:由于是小批量,所以是memory bound,我们需要用�加载所有参数的时间来除以内存带宽,这里我们忽略了kv cache的读取时间,因为kv cache的大小取决于总tokens的数量大小,这里并不好量化。
- P 是总参数量,2P是bytes量
- b 代表单位 bytes
- N 是 GPU 的数量
- Abm是memory bandwidth
- Comms
- 4 是每层需要四次通信(可见上面的模型并行的解释)
- nlayers 是解码器堆叠数
- 8us 是目前估计的最小的通信延时(这里作者采用 8 microseconds(10^-6 seconds) per message in Citadel paper for V100 NVLink.)
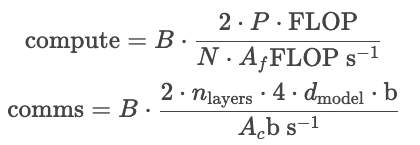
大批量延时计算公式
对于大批量(如512),latency 计算公式如下
- Compute 中,我们将总 flops 除以 N 个 GPU 的 flops/s 得到计算延时
- B 是批量大小
- 2P (flops),P是总参数量。2P 是每个参数向量都要进行矩阵乘,对于参数(m,m),如果参数量为m^2,则其矩阵乘flops为2m^2
- Af (flops/s) 是单个 GPU 的每秒浮点运算操作,同样在 KV Cache 有详解。
- Comms 中,用总共需要通信的字节数除以通信吞吐量
- B 是批量大小
- b 代表单位 bytes
- 2 是 float16 中有两个 bytes
- nlayers 是解码器堆叠层数,需要经过 nlayers 轮计算。
- 在模型并行中,我们有提及
4(N-1)d_model/N为一层解码器内的通信数据量,这里把 (N-1)视作 N,得到4*d_model - 所以分�子为
2*nlayers*4*d_modelbytes - Ac (byte/s) 是 GPU 间的通信吞吐量,模型并行中有提及(300GB/s)。
实例:Gopher sized 260B model on 16 GPUs,A100(1.5e12 是内存带宽)
小batch的延时如下所示,一个token计算延时为22ms,通信延时为3ms

大batch的延时如下所示,从comms可得通信吞吐量为18/512=25us,一个token计算延时为53ms

结论
因为 comms 和 compute 是并行的,我们选择最高的值作为延时,。需要避免 comms 大于 compute。我们不可能通过无限量地添加 GPU 增加计算能力来从而延时降到最低,comms 会随着 GPU 变多而增大。
虽然计算出来的延时比实验小,因为没有考虑到硬件使用率,没有考虑softmax、addnorm操作的延时��等,但演示计算公式有助于思考如何去优化性能。
批次大小 Batch Size
批量大通常意味着更高的GPU利用率
batch size 是指在一次推理中同时处理的请求数量。比如,batch size = 4 意味着在一次推理操作中,模型同时处理 4 个请求。request 请求是模型推理过程中输入的 prompt,每个 request 包含的 token 数量可以不同。
- 在没有达到速度与内存带宽的比值临界点前,更大的批处理大小通常意味着更高的 GPU 计算利用率,从而提高推理效率。
批量大小是影响推理性能(延时)的重要因素,延时计算中提到小批量是memory bound,大批量是flops bound(如下公式所示)。在实践中,我们希望达到flops bound,因为这样可以尽可能利用通信带宽、内存带宽以及flops计算资源。那么,如何找到临界最佳批量呢?
- 批量大了一开始会有助于达到flops bound,但批量太大了,会使得通信延时增大,反而会增加总体延时。
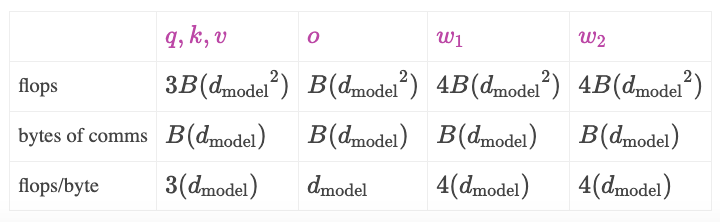
使用 flops/byte 来统计flops是否大于comms
在一个编码器层中,总共有四次通信,中间穿插着计算,我们希望每步通信中flops延时长于comms延时。这里用一个奇怪的比值,每bytes通信触发的flops(flops per bytes of comms)来作比较。下表展示了 flops/byte 的估计值
- 在 A100 中,flops/comms = 312e12/300e9 =1040,所以我们要尽可能让表中最后行flops/byte的值大于1040以追求flops bound,由于每步通信的flops/byte都不同(d_model, 3d_model, 4d_model),如果d_model大小是1024,那每步通信前后都能做到flops bound。
一些结论
-
在API请求少时,batch size会很小,可以把kv cache去掉,来更多地利用flops,因为flops比内存加载更快(?todo => )
-
如果API请求的批量很大,可能最好还是使用允许flops bound的临界值的批量大小,因为这样子可以优化per-request-latency(todo)
- 如果是 comput bound,应该用KV Cache减少 compute。如果是 memory bound,应该尽可能使用 compute
-
对于像 AlphaCode 这样的推理任务,我们可能希望插入尽可能多的gpu,所以可以尽可能增大batch size。
flops 计算
下面我们估算Transformer的flops计算量是否是上面所提的2P
Attention
- Wk,Wq,Wv 权重,矩阵乘法
- W(d_model, d_model), X(1, d_model):
3*2*d_model^2
- W(d_model, d_model), X(1, d_model):
- 计算/拼接 Z
- softmax:
d_model
- softmax:
- Wo 输出映射权重,矩阵乘法
- WO(d_model, d_model), Z(d_model, 1):
2*d_model^2
- WO(d_model, d_model), Z(d_model, 1):
FNN
- 全连接层 W1(d_model, 4d_model), W1(4d_model, d_model):
8*2*d_model^2- 中间有 ReLU,可以忽略不计
Others
- 在第一层前,有token embedding,有位置编码计算
- 在 FFN 中的激活层计算(上面已经提及)
- 在FFN后,有layer norm残差连接层,其权重向量为 d_model
- 最后一层解码器后,还会有softmax和output token unembedding的工作
这些计算都是向量层级的操作(vector-vector (or even vector-scalar) operations),都是 d_model 维度的而不是d_model^2,即使有100个这样的操作,其总flops计算量也就100M,远远达不到flops计算量的0.1%
All
汇总 d_model^2 级别的操作,我们可以得到 2*n_layers*12*d_model^2,即 2P

以 52B 参数模型的参数为例,d_model 为 8192,n_layes 为64,flops 约为103B,已经是 52B 的两倍了。

中间的内存成本 Intermediate memory costs
Data Movement Is All You Need 提到在实际硬件上,模型的操作(如矩阵乘法、layernorm、softmax)会因为数据移动的成本而产生延迟。
虽然通常我们用 FLOPs 来衡量计算复杂度,但对于一些操作(如 softmax),它们的主要性能瓶颈在于内存的读写速度,而不是计算本身。因此,在评估模型的性能时,除了关注计算复杂度,还需要考虑数据移动的延迟(内存带宽)。
the latency for softmax is actually slightly higher than the calculations for qkv (which are a 1/3 of the time). This is a little concerning!
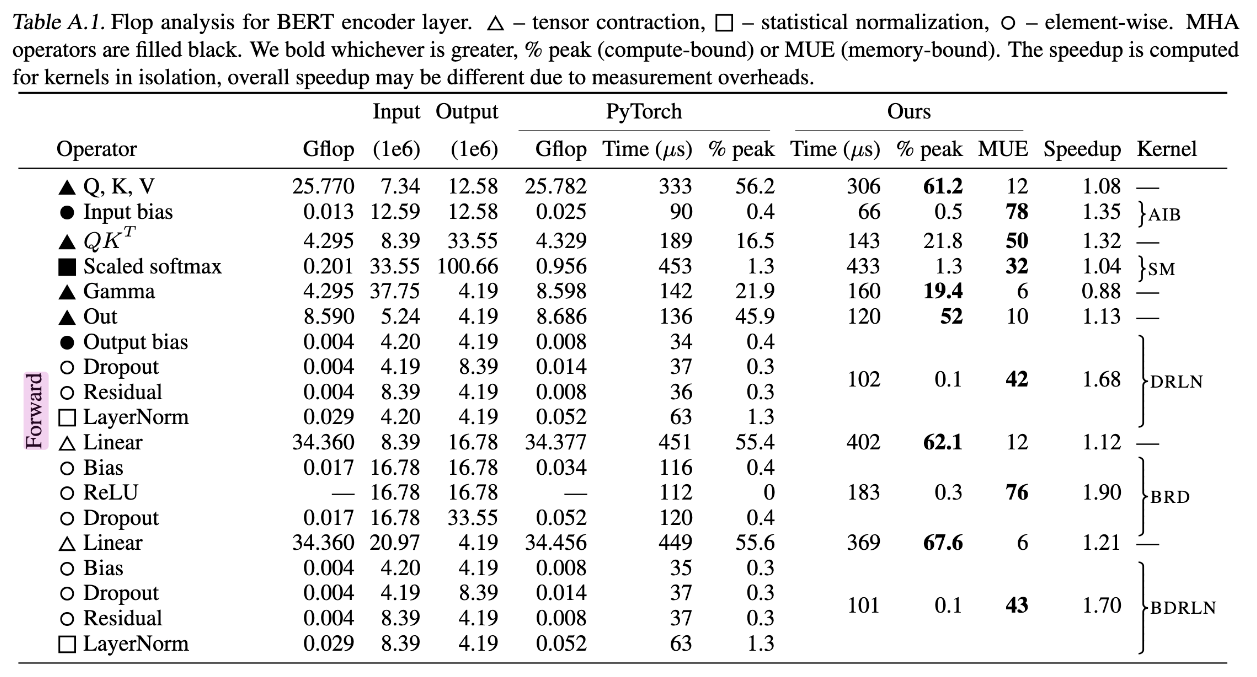
-
the softmax is memory bound, so is the multiplication of qk, ReLU and dropout are also quite expensive.
-
Softmax 的内存操作可以优化,但在现有实现中并不完美。
-
随着模型规模增加,FLOPs 增速高于内存操作的增速,因此内存受限操作的相对重要性降低。
-
在更大模型(如 52B 参数)中,中间操作对总推理延迟的影响变得微不足道,约占 5%。
与真实的基准报告作比较 comparing against real beachmarks
There is a sadly small number of public benchmarks available for model parallel inferencing?
现在公开的 beachmarks 只有 Nvidia FasterTransformer and Microsoft Deepspeed
Use 2 GPUs, I've run a 13B parameter model with FasterTransformer
13B is 40 layers, 40 heads, each of dim 128 for a dim size of 5120
We'll start with a 512 context length, batch size 1 and 10 tokens outputted. For a small batch for one token on 2 GPUs we expect 8.4ms, and about 1ms of comms. For 1 GPU, that would be 16.8ms and 0 comms. (2x40x12x5120^2/1.5e12)
Our empirical result for 1 GPU is 22.0ms, meaning our guess was 76% there.
Question
- 是否考虑到 flops bound 和 memory bound,最佳的推理上下文长度是 208(flops/bytes)?=> reddit 有人回答,optimal context length = (显存大小GPU VRAM - KV Cache)/ batch_size