Distributed Training Approaches
概述
目标是将单节点训练系统转换成等价的并行训练系统。
一个训练过程会由多个数据小批次(mini-batch)完成。
- 一个数据小批次被标示为数据。训练系统会利用数据小批次生成梯度,提升模型精度。这个过程由一个训练程序实现,其往往实现了一个多层神经网络的执行过程。
- 该神经网络的执行由一个计算图(Computational Graph)表示。这个图有多个相互连接的算子(Operator),每个算子会拥有计算参数。每个算子往往会实现一个神经网络层(Neural Network Layer),而参数则代表了这个层在训练中所更新的的权重��(Weights)。
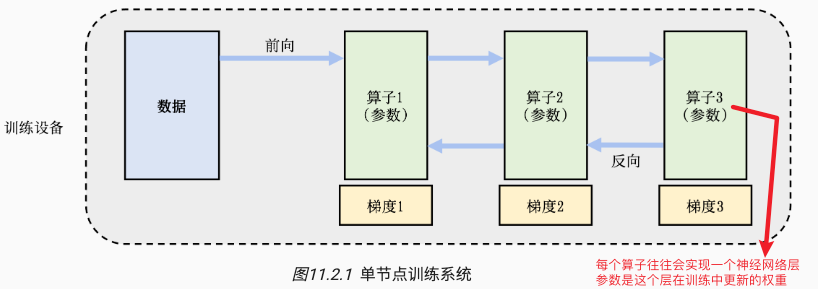
为了更新参数,计算图的执行分为前向计算和反向计算两个阶段。
- 前向计算的第一步会将数据读入第一个算子,该算子会根据当前的参数,计算出计算给下一个算子的数据,依次重复前向传递到最后一个算子。
- 反向计算中,每个算子依次计算出梯度(执行顺序:梯度3,梯度2,梯度1),并利用梯度更新本地的参数。反向计算结束标志了本次数据批次的结束,程序可以执行下一批数据继续更新。
在模型训练任务中,根据数据和程序的切分(Parttion),从而完成并行加速。
- 数据并行(Data Parallelism,DP):对数据进行分区,讲一个程序复制到多个设备上并执行。
- 模型并行(Model Parallelism,MP):对程序进行分区(模型中的算子会被分发给多个设备分别完成)
- 混合并行(Hybrid Parallelism,HP):训练超大型智能模型时,开发人员往往要同时对数据和程序进行切分,从而实现最高程度的并行
- 流水线并行(Pipeline Parallelism, PP):通过流水线减少模型并行气泡(Model Parallelism Bubble),提高模型使用率。
| 分类 | 单数据 | 多数据 |
|---|---|---|
| 单程序 | 单程序单数据: 单点执行 | 单程序多数据: 数据并行 |
| 多程序 | 多程序单数据: 模型并行 | 多程序多数据: 混合并行 |
数据并行 DP
数据并行(Data Parallel)常用于解决单点算力不足的问题。
可见于各大训练框架中:TensorFlow DistributedStrategy、PyTorch Distributed、Horovod DistributedOptimizer等。
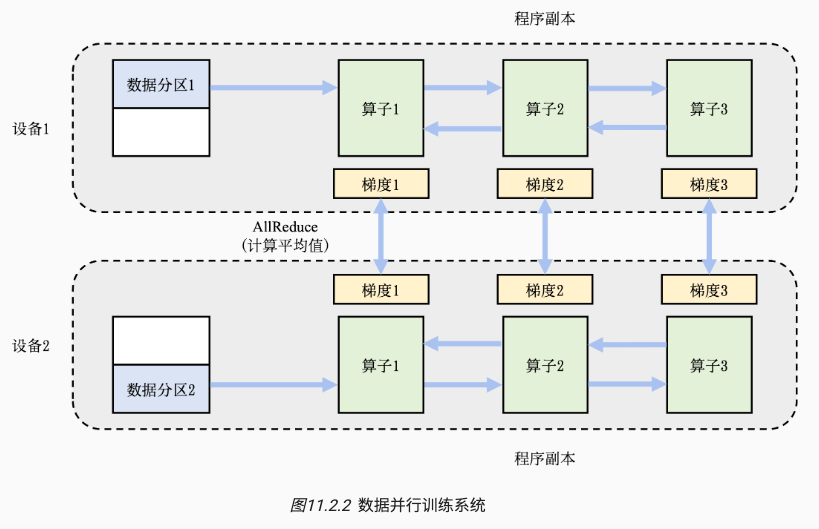
假设用户输入数据批大小为 N,并且希望使用 M 个并行设备来加速训练。
- 那么,这个数据会被分为 M 份,每个机器分配到 N/M 的数据。
- 每个机器的训练程序副本(网络参数)一致,独立执行,计算出局部梯度 Gi。
- 不同设备上对应的局部梯度 Gi(如设备1和设备2上各自的梯度1)会进行聚合,从而计算平均梯度。这个聚合的过程往往由集合通信的 AllReduce 操作完成。
- 平均梯度会用于修正模型参数,完成本批次训练。
模型并行 MP
模型并行(Model Parrallelism)常用于解决单点内存不足的问题。让每个设备负责更少的计算量,能够在内存容量的限制下完成前向计算和反向计算。
主要有两类
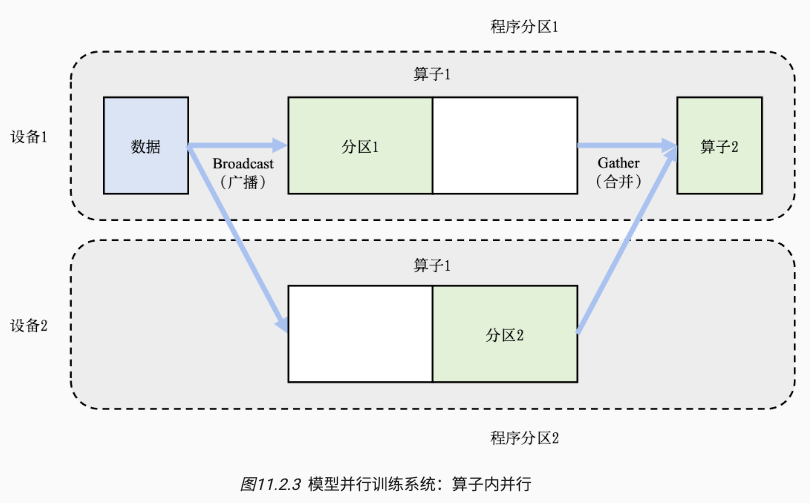
- 算子内并行(Intra-operator Parallelism)
- 场景:模型中含有大型算子,例如深度神经网络中需要计算大量分类的全连接层。
- 方案:把大型算子拆分到多个设备上,前向传播和后向传播也要做相应的变化(广播参数和合并参数)。
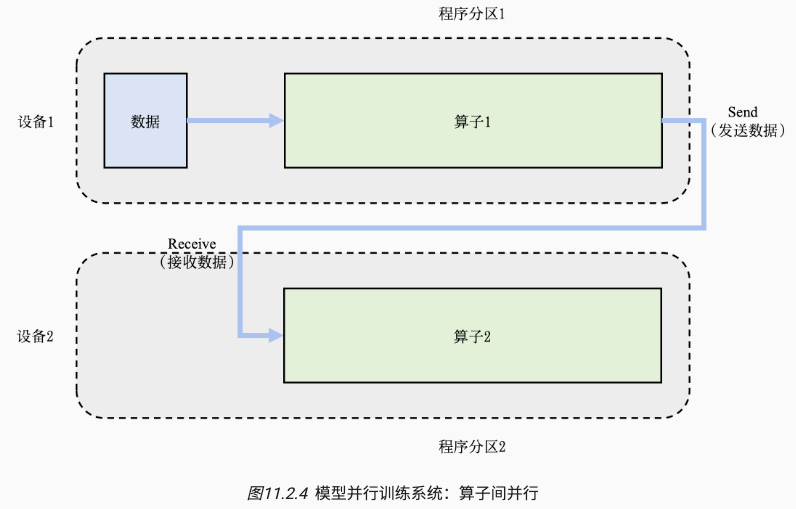
- 算子间并行(Inter-operator Parallelism)
- 场景:模型的总内存需求超过了单设备的内存容量。
- 方案:假如有 N 个算子和 M 个设备,可以将算子平摊到这 M 个�设备上。让每个设备仅需负责 N/M 个算子的计算和内存开销。
算子内并行图里:假设一个神经网络具有两个算子,算子1的计算(包含正向和反向计算)需要预留16GB的内存,算子2的计算需要预留1GB的内存。而本例中的设备最多可以提供10GB的内存。为了完成这个神经网络的训练,需要对算子1实现并行。具体做法是,将算子1的参数平均分区,设备1和设备2各负责其中部分算子1的参数。
算子间并行图例:假设一个神经网络具有两个算子,算子1和算子2各自需要10GB的内存完成计算,则模型总共需要20GB的内存。而每个设备仅能提供10GB内存。用户可以把算子1放置在设备1上,算子2放置在设备2上。
混合并行 HP
在训练大型模型时,常常会遇到内存和算力都不足的情况,此时需要做混合并行(数据并行+模型并行)。
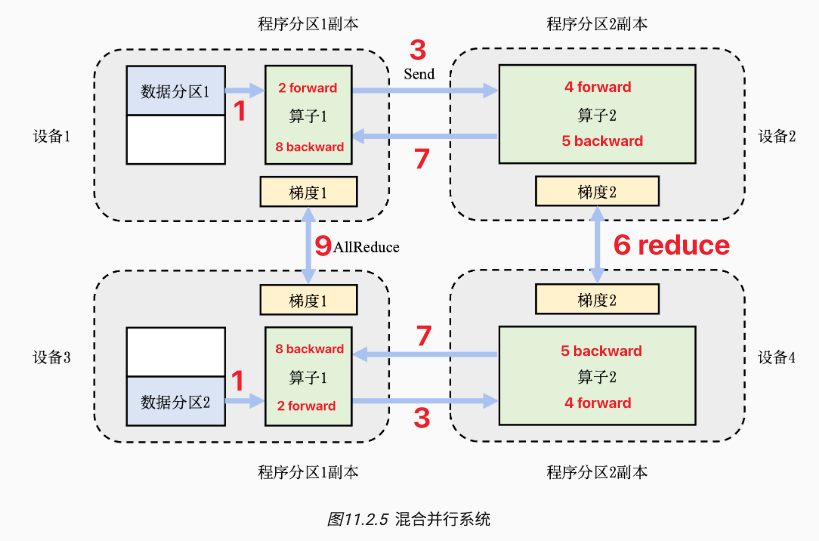
在下图中
- 数据并行:上面的设备12和下面的设备34之间是数据并行,输入的数据被分区计算,最后执行 reduce,
- 数据批次太大,单机算力不足,数据并行提高算力。
- 模型并行:设备1和2是模型并行,模型内的算子1、2被分到不同设备上。同理,设备3和4也是。
- 模型太大,单机内存不足,模型并行解决内存瓶颈。
- 在前向计算的过程中,设备1和设备3上的算子1副本同时开始,计算结果分别发送(Send)给设备2和设备4完成算子2副本的计算。在反向计算中,设备2和设备4同时开始计算梯度,本地梯度通过AllReduce操作进行平均。反向计算传递到设备1和设备3上的算子1副本结束。
流水线并行 PP
除了数据并行和模型并行以外,流水线并行是另一种常用的实现分布式训练的方法。
在大型模型并行系统中。这种系统通过算子内并行和算子间并行解决单设备内存不足的问题。
Problem: 模型并行气泡(Model Parallelism Bubble)。
- 并行系统的运行中,计算图中的下游设备(Downstream Device)需要长期持续处于空闲状态,等待上游设备(Upstream Device)的计算完成,才可以开始计算,这极大降低了设备的平均使用率。这种现象称为模型并行气泡(Model Parallelism Bubble)。
Solution 为了减少气泡,通常可以在训练系统中构建流水线。
- 将训练数据中的每一个小批次划分为多个微批次(Micro-Batch)。假设一个小批次有 N 个训练样本,将其划分为 M 个微批次,那么一个微批次就有 N/M 个数据样本。每个微批次依次进入训练系统,完成前向计算和反向计算,计算出梯度。每个微批次对应的梯度将会缓存,等到全部微批次完成,缓存的梯度会被加和,算出平均梯度(等同于整个小批次的�梯度),完成模型参数的更新。
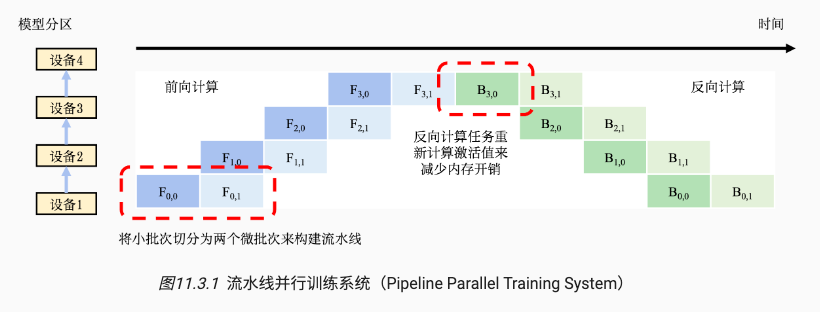
在图例中
- 模型参数需要切分给4个设备存储。为了充分利用这4个设备,将小批次切分为两个微批次。
- 前向计算
- 假设 Fi,j 表示第 j 个微批次的第 i 个前向计算任务。当设备 1 完成第一个微批次的前向计算后(表示为F0,0),会将中间结果发送给设备2,触发相应的前向计算任务(表示为F1,0)。与此同时,设备1也可以开始第二个微批次的前向计算任务(表示为 F0,1)。前向计算会在流水线的最后一个设备,即设备3(捉虫,是不是设备4?),完成。
- 后向计算
- Bi,j 表示第 j 个微批次的第 i 个反向计算任务。在前向计算完成后设备4开始第一个微批次的后向计算 B3,0,完成后传递给设备 3 进行 B2,0,同时设备4开始计算第二个微批次的 B3,1
其他
- 计算梯度往往需要前向计算中产生的激活值。经典模型会缓存激活值,反向计算直接用。但流水线训练系统中内存紧张,所以在反向计算中重新计算(Recomputation)。
- 流水线训练系统需要调试微批次的大小,从而达到最优的系统性能。当设备完成前向计算后,必须等到全部反向计算开始,在此期间设备会处于空闲状态。
- 流水线气泡(Pipeline Bubble):
- 可以看到设备1在完成两个前向计算任务后,要等很长时间才能开始两个反向计算任务。这其中的等待时间即被称为流水线气泡(Pipeline Bubble)。为了减少设备的等待时间,一种常见的做法是尽可能地增加微批次的数量(批次小了),��从而让反向计算尽可能早开始。 => 我理解是设备1虽然还是要等6个批次的计算时间,但批次小了,总体的等待时间也少了。。
- 然而,使用非常小的微批次,可能会造成微批次中的训练样本不足,从而无法充分的利用起来硬件加速器中的海量计算核心。因此最优的微批次数量由多种因素(如流水线深度、微批次大小和加速器计算核心数量等)共同决定。
- 流水线气泡(Pipeline Bubble):
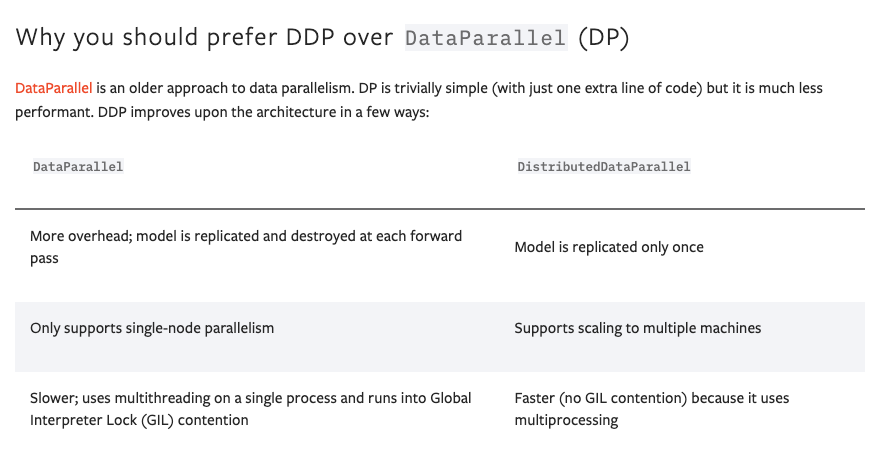
DDP?
https://pytorch.org/tutorials/beginner/ddp_series_theory.html